Frank Kolkman veut ouvrir la chirurgie avec son robot DiY
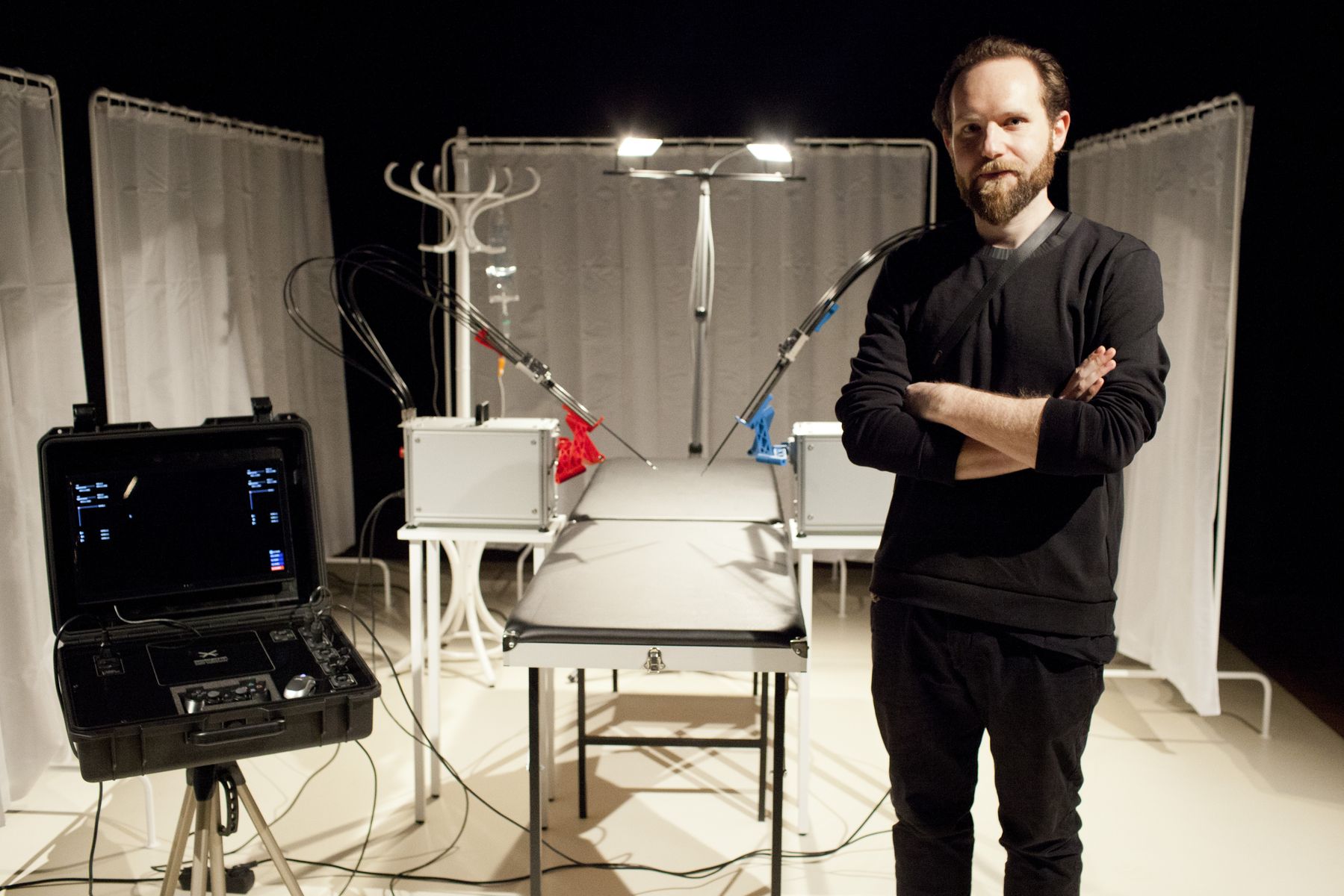
Seriez-vous prêt à vous lancer dans la chirurgie ouverte? Le designer robotique Frank Kolkman présente un robot chirurgien DiY à la galerie art et sciences Kapelica de Ljubljana en Slovénie. Et engage la discussion sur les implications de l’ouverture d’un domaine médical extrêmement régulé.
Depuis de nombreuses années, on trouve sur Youtube des vidéos tutorielles postées par des Américains sans assurance santé qui pratiquent sur eux-mêmes ou leurs amis des opérations chirurgicales ou dentaires basiques. Le phénomène a inspiré le designer hollandais Frank Kolkman qui s’est attaqué en 2015 à la construction d’un robot chirurgien DiY. Kolkman a acheté ses pièces de chirurgie en Chine, hacké certains éléments, transformé sa cuisine en lab de chirurgie DiY et customisé son robot Open Surgery avec des pièces découpées au laser ou imprimées en 3D.
Jurij Krpan, directeur artistique de la galerie Kapelica commente son intérêt à présenter le robot de Frank Kolkman :
«Les grands groupes des industries médicales et pharmaceutiques construisent leur richesse sur l’exploitation des gens malades et creusent en réalité le fossé qui sépare ceux qui peuvent se payer des services de santé et ceux qui ne peuvent pas. Open Surgery est un projet spéculatif intelligent qui soulève la question d’une alternative possible à la biopolitique de la gouvernance capitaliste.»
Jurij Krpan, galerie Kapelica

Kolkman dit qu’il avait « l’intention naïve de diffuser ses plans en open source », utilisant dans les faits des pièces génériques non reconnaissables et fabriquant lui-même bon nombre des éléments. Il s’est cependant rendu compte que le monde des machines chirurgicales était extrêmement régulé. S’il se met à diffuser plus largement ses plans, il y a un fort risque de voir les entreprises propriétaires se saisir en justice de l’affaire. Kolkman reste donc encore prudent et veut mener plus d’investigations sur les aspects légaux. Bien que les chirurgiens accueillent très favorablement sa démarche.
«Quand on parle d’outils médicaux, d’autorisations, de régulations et de certificats, les chirurgiens ont l’esprit bien plus ouvert que les ingénieurs. Je pense que c’est parce que les chirurgiens sont déjà habitués à assumer les responsabilités directes de leurs patients, alors que les designers, les ingénieurs et même les directeurs d’hôpitaux n’auront au mieux que des responsabilités secondaires. Les chirurgiens seront ainsi plus à même d’accepter des solutions de fins-qui-justifient-les-moyens si celles-ci peuvent les aider à réaliser leurs objectifs dans des circonstances particulières.»
Frank Kolkman, designer
Le robot chirurgien en mouvement:
Téléchirurgie et science ouverte
Une des motivations de Kolkman a été l’incroyable développement de la robotique chirurgicale. La lecture d’un article de Wired en 2014 racontant les exploits du da Vinci Surgical System l’a grandement inspiré. Le robot permet de mener des procédures chirurgicales longues et complexes avec une précision et une dextérité « plus qu’humaine ». Les traumatismes du patient sont réduits et l’expérience du chirurgien est moins stressante. Ce dernier bénéficie d’une vue 3D stéréoscopique et pilote les bras machiniques grâce à un joystick.

Mais les machines sont excessivement coûteuses, pouvant aller jusqu’à 2 millions de dollars, ce qui constitue pour les hôpitaux un lourd investissement. L’explosion des prix d’un domaine sans concurrence va contre la logique d’une potentielle réduction des coûts de santé pour le patient, bloque le passage du manuel vers la précision robotique et tend à réduire les horizons de démocratisation pour les pays dont les systèmes de santé ont peu de moyens.
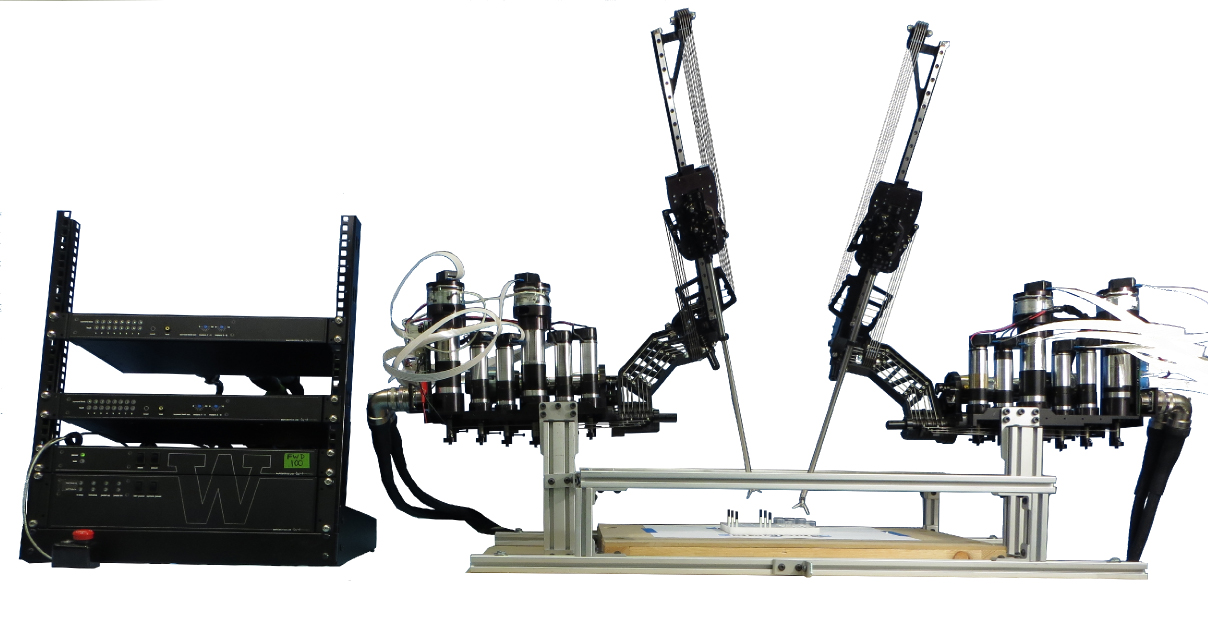
Développer des outils DiY relève donc du pragmatisme pour Frank Kolkman. Beaucoup de chirurgiens rêvent de machines pour la chirurgie de première ligne, dans les zones de conflit ou déficitaires en infrastructures hospitalières modernes. Kolkman souligne qu’une machine répond déjà aux attentes, le RAVEN II Surgical Robot, développée grâce à des financements militaires américains pour créer un outil de chirurgie portatif à utiliser sur les théâtres d’opérations (militaires) ou dans l’espace.
Le logiciel pilotant le RAVEN II est aujourd’hui en open source et inspire de nombreuses recherches dans les laboratoires universitaires. Mais le coût de la machine, à 200 000$, la rend toujours inaccessible pour la communauté de hackers médicaux. C’est pour tenter de parvenir à une machine qui coûterait environ 5 000$ que Frank Kolkman s’est lancé dans l’aventure de sa technologie disruptive.
Une logique open hardware
Son objectif était donc de concevoir un robot chirurgical capable de réaliser des opérations de cœlioscopie (opération abdominale réalisée sans ouvrir la paroi abdominale) telle que réalisées par le système da Vinci. En cœlioscopie, une « optique » (reliée à une caméra) est introduite dans la cavité abdominale à travers une incision que le chirurgien pratique dans l’ombilic. Du CO2 est ensuite introduit dans la cavité pour soulever la paroi abdominale, créant ainsi un espace entre la paroi et les viscères, que le chirurgien peut observer sur un moniteur et où il peut introduire ses instruments pour opérer. Enfin, des « trocars » (sortes de grosses aiguilles de 5 à 12 mm) sont introduits à travers la paroi ainsi soulevée, par lesquels le chirurgien va passer des instruments pour opérer (pinces, ciseaux, instruments de coagulation et de suture, etc.).


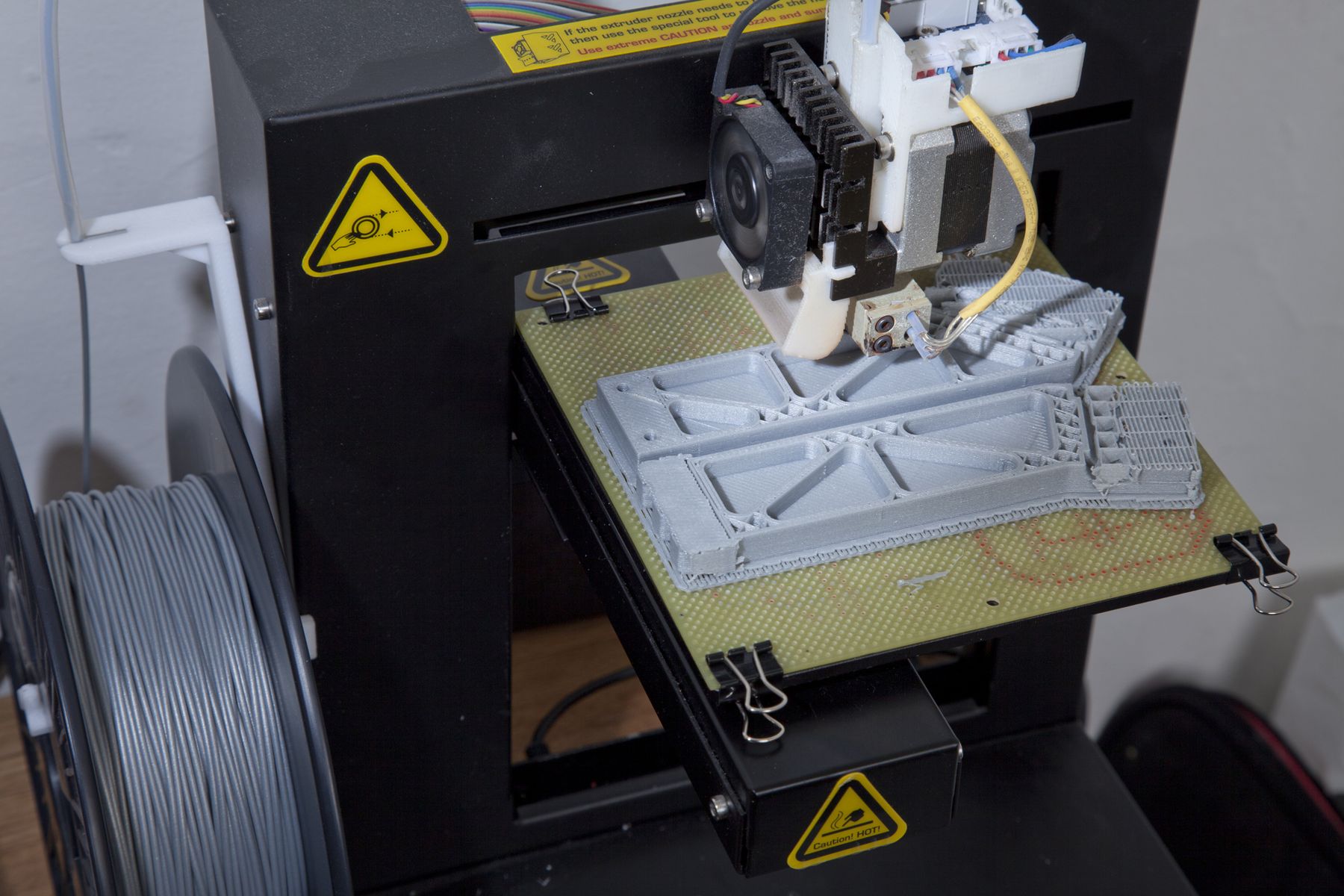
Kolkman a acheté une grande partie des instruments spécialisés directement aux fabricants en Chine via Alibaba, ainsi que du matériel périphérique, l’écran de monitoring, les modules de caméra, les pompes pour diffuser le CO2. Le four de la cuisine fait par ailleurs parfaitement l’affaire comme autoclave à une température de 160° pendant 4 heures. Et pour les parties plastiques, le micro-ondes convient très bien. Le plus compliqué reste finalement le système mécanique. Kolkman a conçu quatre éléments imprimés en 3D pilotés par deux servo-moteurs et tournant autour d’un axe central. L’électronique est à peu près la même que celle d’imprimantes 3D « classiques », et le logiciel est conçu sous Processing.




Le système fonctionne mais le designer précise qu’il n’a pas encore réalisé d’opérations réelles et qu’il ne faut pas s’engager à la légère dans des opérations chirurgicales avec cette machine DiY ! Du travail de développement est encore à mener, de même qu’une formation sérieuse sur la machine sera nécessaire avant usage.
«Il faut comprendre que l’objectif principal du projet n’était pas de développer une machine “opératoire” utilisable tout de suite en conditions réelles. Il s’agissait plus d’une expérimentation pour vérifier la plausibilité de l’idée de créer un robot chirurgical DiY.»
Frank Kolkman, designer
Mais selon Kolkman, une bonne communauté de makers chevronnés et branchés médecine pourraient très bien dans les prochaines années faire avancer le nouveau domaine de la chirurgie ouverte et la rendre accessible à beaucoup de monde.
Pour Jurij Krpan, « le prototype fonctionnel du robot de chirurgie cœlioscopique est pour le moment encore un peu approximatif mais je suis convaincu que son potentiel politique peut attirer d’autres activistes de l’open source et les convaincre de s’engager dans le développement de scénarios que la société devra considérer. Les entreprises pharmaceutiques et l’industrie médicale en général sont principalement intéressées par les profits qu’elles peuvent réaliser, on ne peut plus ignorer ce problème éthique. Il est plus qu’urgent de reconsidérer leur responsabilité sociale ! Le scénario ouvert par Open Surgery stimule la pensée et permet de spéculer sur des futurs possibles. Il peut constituer un excellent levier pour ouvrir le débat public.»
Le site Open Surgery
Exposition « Open Surgery » à la galerie Kapelica (Ljubljana, Slovénie), du 1er au 15 mars 2016