

Le mini-robot ABC contrôlé par télécommande infrarouge (capture écran). © CC by SA
C’est un mini-robot en bois, qu’on guide avec une télécommande. Son concepteur, Jonathan Quesnel, est l’un des premiers makers à utiliser la nouvelle plateforme de tutos open source Wikifab. Suivez le guide.
La robotique, ce n’est pas si compliqué. La preuve avec le mini-robot ABC de Jonathan Quesnel, qui en livre le tuto sur la plateforme Wikifab. Le maker affirme que son robot piloté via un micro-contrôleur Arduino à la télécommande infrarouge est montable en 2h.
Wikifab, késako?
Lancée mi-juin 2016 en France, Wikifab est une plateforme associative de partage de tutoriels en ligne open source, qui rêve de devenir le « Wikipédia des makers » – elle fonctionne d’ailleurs avec un moteur Mediawiki. La plateforme, créée par Clément Flipo et Pierre Boutet, compte aujourd’hui 650 inscrits et 350 tutoriels. Certains fablabs l’utilisent également pour documenter leurs projets, comme le Low-tech Lab à Concarneau ou le Numlab en Guyane.
Matériel pour le robot ABC
– 1 planche de bois, dimensions : 5mm X 610mm x 407mm
– 1 tournevis cruciforme, une clé Allen et une pince de serrage
– 1 Arduino Uno
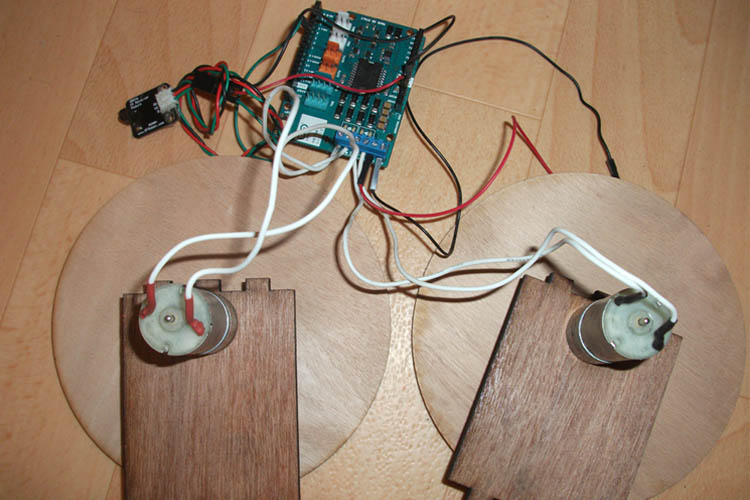
– 2 moteurs DC et 1 shield moteur
–1 kit infrarouge Arduino avec capteur
– une télécommande infrarouge (type télécommande de lecteur DVD)
– 6 piles LR6 1,5V et 4 piles 4,5V
– 8 écrous M4, 8 vis M4-50, 2 vis M3-5 et 4 embases M4
– 1 ruban à LEDs
Réalisation
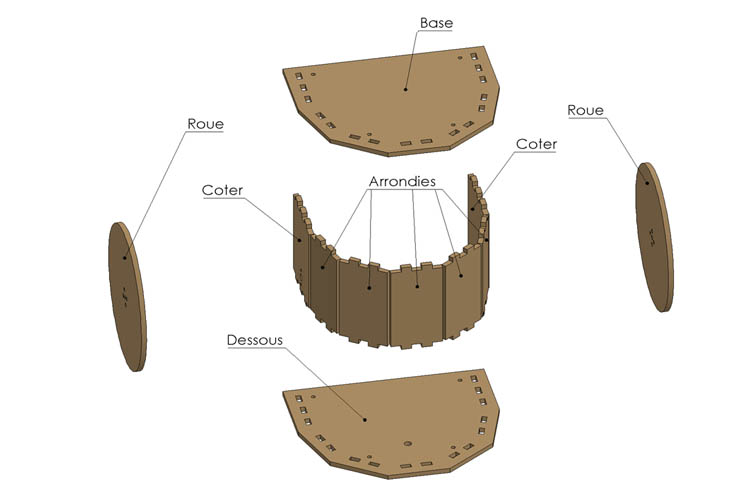
1) Découper les différentes pièces de bois à la découpeuse laser, selon les plans.

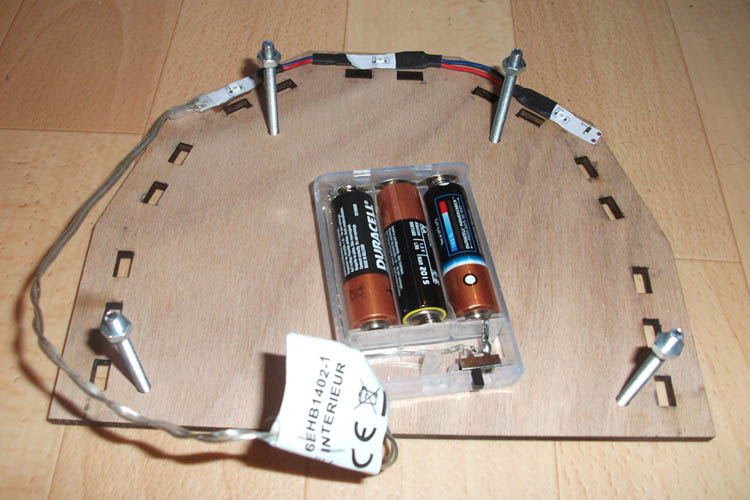
2) Sur la base (la planche la plus haute du robot), poser un support de piles et l’entourer d’un ruban à LEDs (5V). Dans chacun des quatre trous de la planche, ajouter une vis. Fixer ensuite un écrou sur chaque vis.
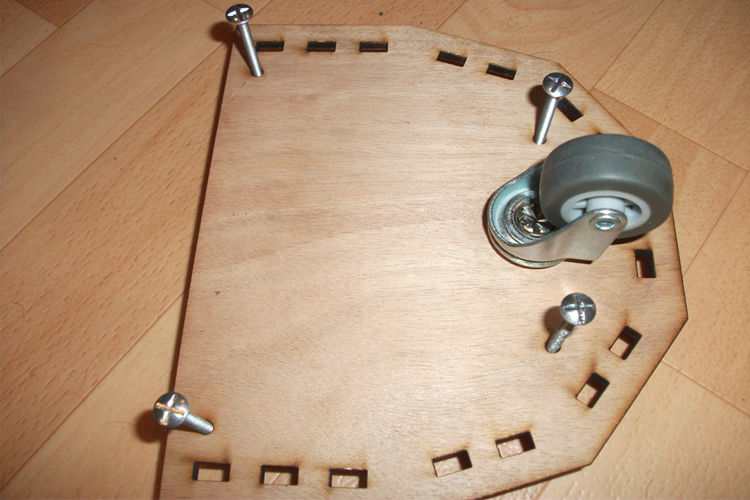
3) Insérer dans les quatre trous de la planche de bois du dessous une vis et un écrou. Ajouter les embases M4. Retourner l’ensemble pour fixer la roue pivotante.
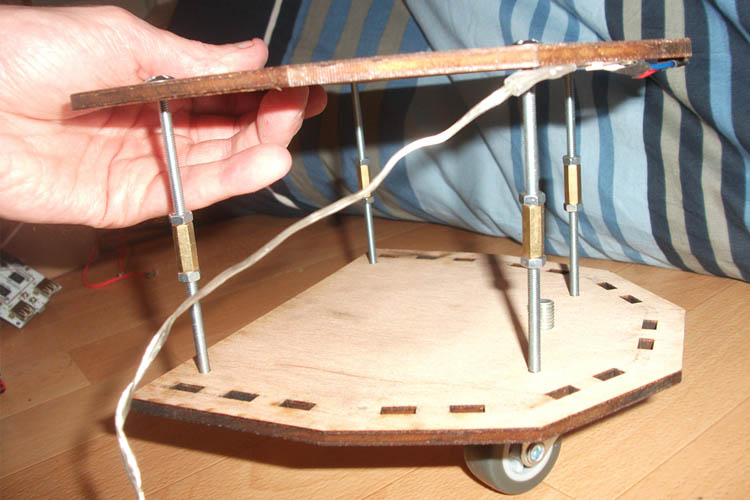
4) Assembler la base et le dessous en vissant chaque vis.
5) Fixer le moteur sur les côtés en bois.
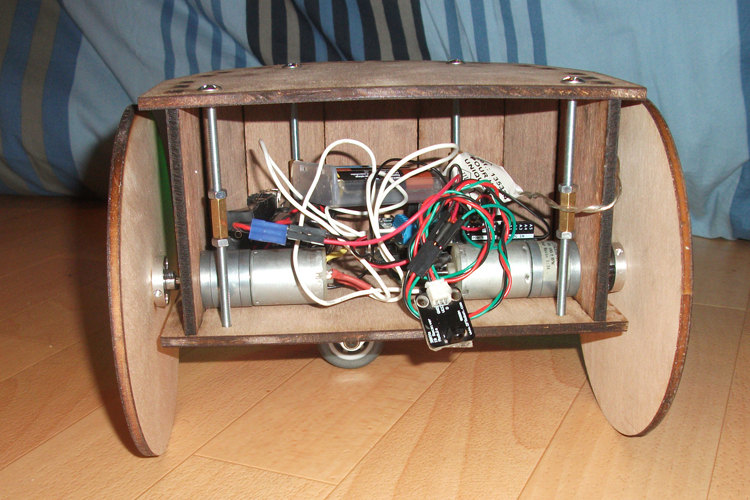
6) Assembler la structure de base, les côtés avec moteur, et les arrondis.
7) Télécharger le fichier de la télécommande, décompresser le fichier ZIP et copier le contenu dans le dossier Arduino « libraries\IRremote ».
8) Tester chaque touche de télécommande, pour récupérer le code dans le moniteur série de l’Arduino. Perdu ? Ce tuto vous aidera à commander votre télécommande.
9) Télécharger le fichier .ino
10) Ouvrir Arduino et téléverser le fichier en branchant la carte Arduino par USB pour insérer le code.
11) Débrancher le port USB.
12) ABC le mini-robot est prêt : il n’attend plus que vous pour rouler !
ABC en action:

Le tuto sur Wikifab du mini-robot ABC et ses fichiers de téléchargement